Ankara’dan dünyaya: Hacettepe’den zorlu koşullarda görebilen robotlar
Hacettepe Üniversitesi öncülüğünde başlatılan TÜBİTAK destekli proje, çoklu sensör füzyonu sayesinde mobil robotların algılama ve haritalama yeteneklerini geliştirerek arama kurtarmadan savunmaya kadar pek çok alanda çığır açmayı hedefliyor.

Hacettepe Üniversitesi Elektrik ve Elektronik Mühendisliği Bölümü öğretim üyesi Doç. Dr. İsmail Uyanık’ın öncülüğünde başlatılan ve TÜBİTAK 1001 programı kapsamında desteklenen yeni bir proje, mobil robot teknolojilerinde yenilikler hedefliyor.
“Mobil Robotlarda Sensör Füzyonu ile Durum Kestirimi ve Haritalama Performansının İyileştirilmesi” başlıklı çalışma, farklı sensörlerden elde edilen verilerin birleştirilmesi (sensör füzyonu) yoluyla robotların çevreyi algılama, konum belirleme ve haritalama yeteneklerini önemli ölçüde geliştirmeyi amaçlıyor.
Projede, Hacettepe Üniversitesi’nden Doç. Dr. İsmail Uyanık’a ODTÜ’den Doç. Dr. Mustafa Mert Ankaralı ve Bilkent Üniversitesi’nden Doç. Dr. Naci Saldı eşlik ediyor.
GELİŞMİŞ SENSÖR SİSTEMİ
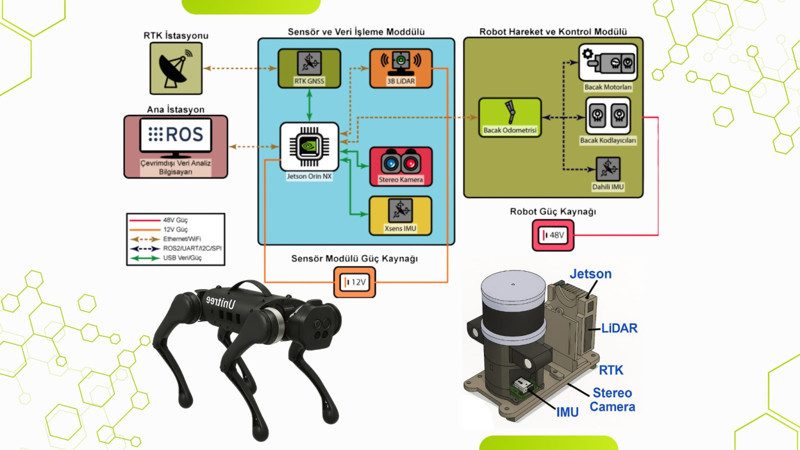
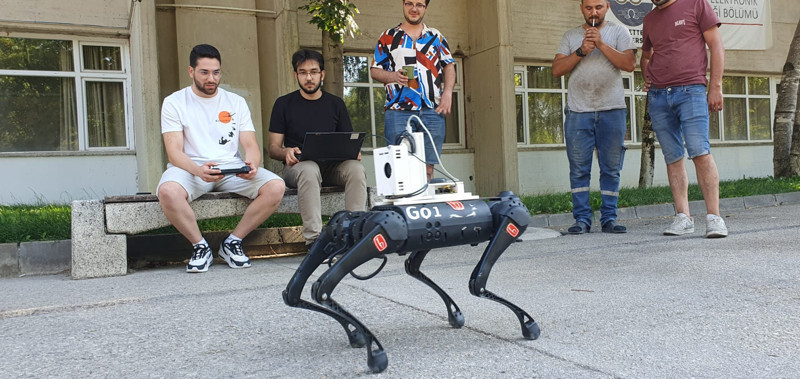
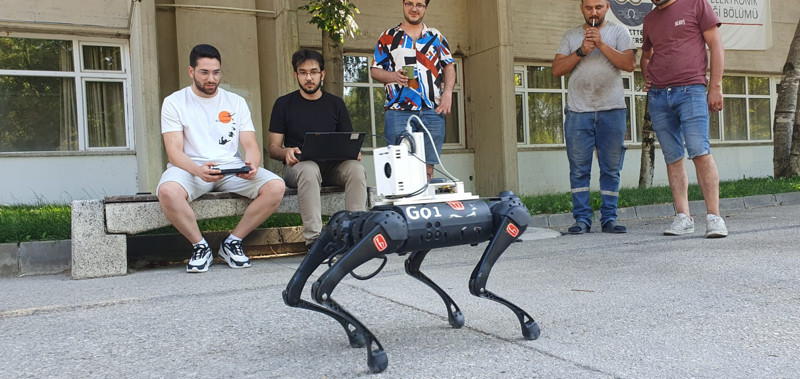
Çalışma kapsamında, dört bacaklı bir robot platformu üzerinde 3B LiDAR, stereo kamera, IMU ve odometri sensörlerinden oluşan çoklu algılama sistemi geliştirilecek. Sistem, hem kapalı hem de açık alanlarda, farklı çevresel koşullarda test edilecek.
Elde edilen veriler üç farklı yöntemle birleştirilecek:
Dinamik Papoulis–Gerchberg (DPG) algoritması ile ham veri füzyonu,
Bayesyen yöntemler (örneğin Kalman filtresi) ile durum kestirimi,
Tersine Pekiştirmeli Öğrenme (IRL) ile yapay zekâ tabanlı adaptif füzyon.
Bu sayede robotlar, tek bir sensöre bağımlı kalmadan çoklu kaynaklardan gelen bilgileri harmanlayarak daha güvenilir kararlar alabilecek.
ARAMA KURTARMADAN SAVUNMAYA KADAR GENİŞ KULLANIM ALANI
Sensör füzyonu teknolojisi; arama kurtarma operasyonlarından savunma sanayisine, endüstriyel otomasyondan otonom araçlara kadar birçok alanda önem taşıyor. Toz, sis veya sinyal kaybı gibi zorlu koşullarda bile robotların görevini sürdürmesini sağlayarak hem güvenliği hem de operasyonel verimliliği artırıyor.
“BİYOLOJİDEN İLHAM ALAN ROBOTLAR GELİŞTİRECEĞİZ”
Projenin bilimsel yaklaşımına değinen Doç. Dr. Uyanık, şu değerlendirmeyi yaptı:
“Uzun süredir laboratuvarımızda, canlılarda çoklu duyusal entegrasyon süreçlerini modellemek ve bu sistemlerin işleyişini anlamak üzerine çalışıyoruz. Bu proje, bugüne kadar biyolojik sistemlerden elde ettiğimiz bulguların ilk kez doğrudan robotik sistemlere aktarılması açısından kritik bir dönüm noktası. Canlılardan öğrendiğimiz algılama ve karar verme yöntemlerini mühendislik teknolojilerine entegre ederek, biyolojiden ilham alan akıllı robotlar geliştirme yolunda önemli bir adım atmış olacağız.”
Proje tamamlandığında yalnızca gördüğünü değil, görmesi gerekeni de anlayabilen, karmaşık ortamlara uyum sağlayabilen akıllı robotların geliştirilmesi hedefleniyor.




